
关于我们
山东伯朗特智能装备有限公司是一家专注于工业机器人的研发、制造、销售、工厂自动化集成应用一体化服务的公司。
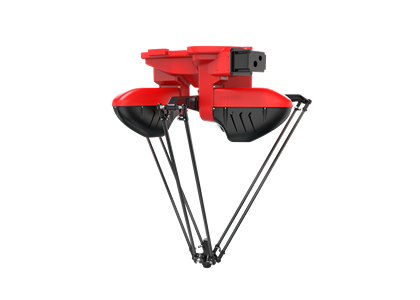
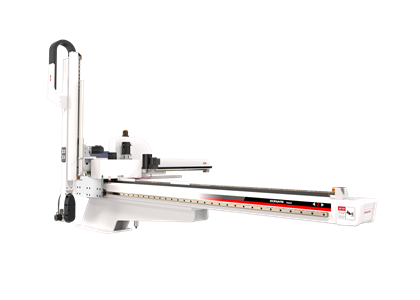
主营产品有:六轴焊接机器人,喷涂机器人,车床上下料机器人,码垛机器人,装配机器人,冲压机器人,打磨机器人,注塑机械手,压铸机器人,锻造机机器人,有10余年的自动化集成经验累积,专业的研发团队为您量身定做生产方案。

经验丰富
山东伯朗特有多年的机械行业经验,提供工业机械应用解决方案
实力雄厚
拥有完备的机加工设备和质量监督体系,为用户提供优质产品
品质保证
严选原材料,通过层层检测,每道工序严格把关,保障产品品质
货源稳定
我们有能力规模系统化的生产,能够提供充足稳定的优质货源


恭喜伯朗特智能装备官网上线
恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装...
2023-12-14
恭喜伯朗特智能装备官网上线
恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装...
2023-12-14
恭喜伯朗特智能装备官网上线
恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装...
2023-12-14
恭喜伯朗特智能装备官网上线
恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装备官网上线,恭喜伯朗特智能装...
2023-12-14




















 微信二维码
微信二维码